欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




FANUC机器人 R-30iB Compact Plus数字输入/输出信号规格详情如下:
外围设备接口
(1) 外围设备接口的输出信号规格(源点型信号输出)
(a) 连接例
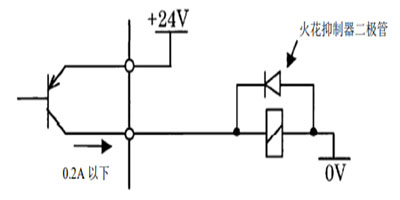
(b) 电气规格
驱动器ON时最大负载电流: 200mA(包含瞬时)
驱动器ON时饱和电压: 1.0Vmax
耐压: 24V±20%(包含瞬时)
驱动器OFF时流出漏电流: 100μA
(c)作为输出信号的外部电源,应提供如下所示的电源。
电源电压: +24V±10%
电源电流: 每一块本印刷电路板的(包含瞬时的最大负载电流的总和在+100mA以上)
通电时机: 与控制装置同时,或在其之前
电源断开时机: 与控制装置同时,或在其之后
(d)火花抑制器二极管
额定反峰值击穿电压: 100V以上
额定有效正向电流: 1A以上
(e)有关输出信号用的驱动器
在驱动器元件内对每1个输出信号监视其电流,检测出过电流时,将该输出置于OFF。过电流所引起的输出OFF,由于其已经OFF而不再为过电流状态,恢复为ON状态。因此,在接地故障或过负载状态下,该输出将反复ON/OFF操作。这样的状态在连接冲击电流大的负载时也会发生。
此外,驱动器元件内还备有过热检测电路,在输出的接地故障等而过电流状态持续、元件内部温度上升的情况下,将元件的所有输出都置于OFF。然而OFF状态会被保持下来,但在元件内部温度下降后,通过进行控制装置电源的ON/OFF操作即会恢复。
(f) 使用时的注意事项
请勿使用机器人侧的+24V电源。
直接向继电器、电磁阀类施加负载时,应将防反电动势二极管与负载并联连接起来。
当连接指示灯点亮时会发生冲击电流的负荷时,请设置保护用电阻。
(g)适用信号
主板 JRM18 的输出信号
[CMDENBL、FAULT、BATALM、BUSY、DO101-112]
(2) 外围设备接口的输入信号规格
(a) 连接示例(+24V公用时)
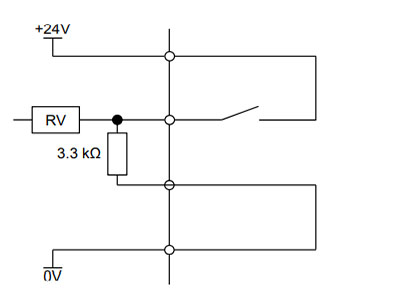
(b) 接收机的电气规格
类型: 接地型电压接收机
额定输入电压: 接点“闭”+20V~+28V 接点“开” 0V~+4V
最大输入外加电压: DC+28V
输入阻抗: 约3.3kΩ
响应时间: 5~20ms
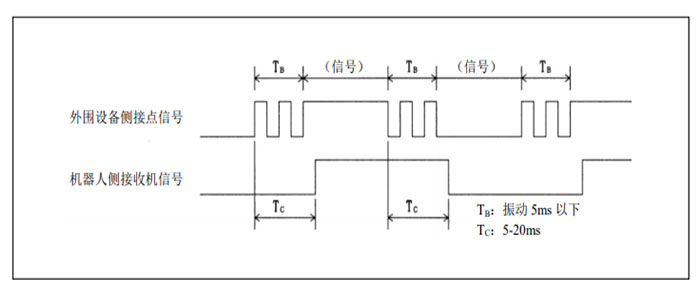
(c)外围设备侧接点规格
电压和电流: DC24V、0.1A(使用最小负荷在5mA以下的接点。)
输入信号宽: ON/OFF均在200ms以上
振动时间: 5ms以下
闭电路电阻: 100Ω以下
开电路电阻: 100kΩ以上
(d) 使用时的注意事项
供应给接收机的电压,应使用机器人侧的+24V电源。
但是,在机器人侧的接收机部位,必须符合上述信号规格。
(e) 适用信号
主板 JRM18 的输入信号
[XHOLD、RESET、START、ENBL、DNS1-DNS4、DI101-DI112]
联系人:刘工
手机:17721351309
电话:021-50157782
邮箱:shygdzi@163.com
地址: 上海市嘉定区博园路858号2号531-532