欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:ABB
上架时间:2021-11-5 发布者:上海仰光
产品描述:ABB控制器选项卡编辑系统 校准基准坐标系的位置: 定位器机构是根据虚拟控制器的基准坐标系值来放置的。当从备份创建了一个虚拟控 制器,定位器使用四点法在线校准,如果定位器在第一个校准点未处于其同步位置, 则定位器机构将不会与系统的任务坐标系对齐。 您可以校准基准坐标系值来重新将定位器机构与系统的任务坐标系对齐。 1 在控制器选项卡,单击编辑系统。系统配置对话框打开。 2 在系统配置窗口,选择定位器机构,然后单击校准。 基准坐标系校准位置对话框打开。 3 从系统配置对话框,复制基准坐标系下的姿态值,然后将这些值粘贴到基准坐 标系校准位置对话框姿态下的框中。 4 单击应用,然后单击确定。在提示时必须重启控制器。定位器机构现在将会与 系统任务坐标系对齐。 任何连接到定位器的对象都会采用定位器的姿态。
概述:
编辑系统窗口包含用于创建和查看高级系统配置的功能,比如更改控制器和基座位置、 校准和设置外轴等。 编辑系统窗口的左侧是层级树视图,借此可以查看系统的各个方面。右侧将显示在树 状图中所选对象的属性页。下方简要描述了工具的各个信息节点的属性页。
小心:编辑系统时,可能导致系统崩溃或异常的机器人行为。在继续之前,务必清楚所作更改将会造成的影响。
系统节点:
单击系统节点将会显示系统信息和添加按钮,单击该按钮可以将新的配置文件加载至系统。
任务节点:
任务节点不包含属性页面。
机械装置文件夹节点:
该节点的属性页包括改变关节和轴的映射的控件。您也可以在此页面设置外轴。
机械装置库文件节点:
该节点的属性页面包含更改机器人和机械装置baseframe的控件。您也可以在此定义 所选baseframe是否被其他机械装置移动(协同运动),如传送带。
更新Baseframe位置:
1 使用摆放或移动工具将机械装置(机器人或外轴)移动到新位置。
2 在控制器浏览器中,选择机械装置的控制器。
3 在控制器选项卡的虚拟控制器组中,单击编辑系统。 这将打开系统配置对话框。
4 在树视图中选择机械装置单元节点。将显示baseframe属性页面。
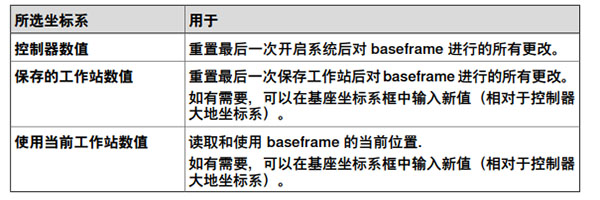
5 选择在重启机器人后要使用的Baseframe位置值。
6 单击确定。
校准基准坐标系的位置:
定位器机构是根据虚拟控制器的基准坐标系值来放置的。当从备份创建了一个虚拟控 制器,定位器使用四点法在线校准,如果定位器在第一个校准点未处于其同步位置, 则定位器机构将不会与系统的任务坐标系对齐。
您可以校准基准坐标系值来重新将定位器机构与系统的任务坐标系对齐。
1 在控制器选项卡,单击编辑系统。系统配置对话框打开。
2 在系统配置窗口,选择定位器机构,然后单击校准。 基准坐标系校准位置对话框打开。
3 从系统配置对话框,复制基准坐标系下的姿态值,然后将这些值粘贴到基准坐 标系校准位置对话框姿态下的框中。
4 单击应用,然后单击确定。在提示时必须重启控制器。定位器机构现在将会与 系统任务坐标系对齐。 任何连接到定位器的对象都会采用定位器的姿态。