欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




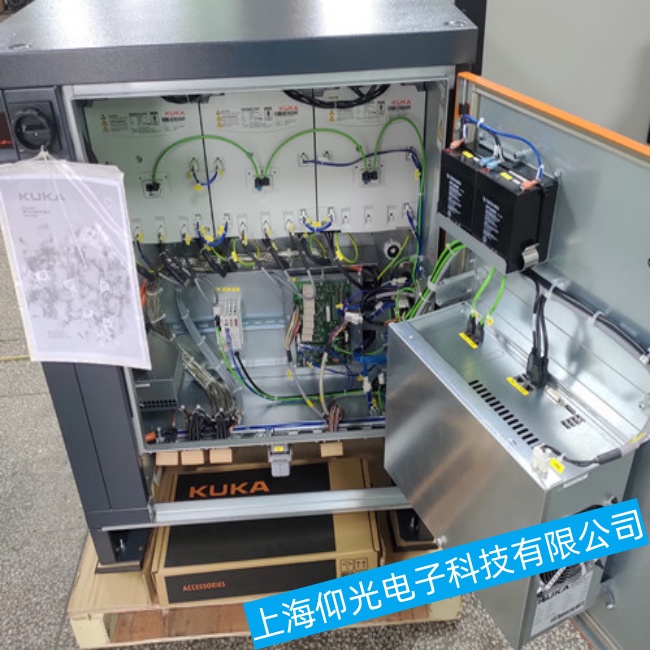
品牌:库卡
上架时间:2021-11-26 发布者:mzx
产品描述:库卡机器人常见的故障分析和解决方案 1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在开机后没有选择工具。 解决方案:配置→当前工具/基坐标→工具号→1