欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:安川
上架时间:2024-1-9 发布者:zyp
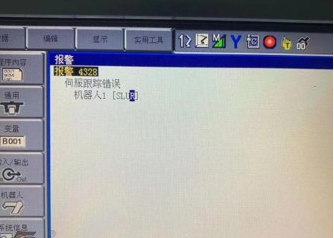
产品描述:1、安川报警界面 控制柜:DX200 2、报警说明 报警一 报警代码:4328 [R] 报警名称:伺服跟踪错误 报警内容:轴数据显示的轴伺服偏差过大,按照与指定动作位置、轨迹的偏差超出容许范围的值动作。 子码内容:表示发生报警的轴 报警原因:软件(动作异常)/机械(外部干涉)/示教(加减速度过大)/电缆(异常)/SDCA01基板(异常)/APU01单元(异常)/放大器(异常)/电机(异常)/SDCA01基板(异常)/其他