欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:ABB
上架时间:2021-11-5 发布者:上海仰光
产品描述:ABB机器人RobotStudio运动指令: 创建运动指令和相应的目标点: 要创建移动指令,请执行以下步骤: 1 单击运动指令 打开对话框。 2 选择运动指令的 参考坐标系。 3 单击点列表中的添加新建,然后在图形窗口中单击相应的到达点,以创建运动指令要伸展到的位置。您也可以在位置框内输入值。 然后单击添加。 4 输入运动指令的 方向。 5 单击 更多/更少 按钮,您可以展开或折叠 创建运动指令对话框。当对话框在展开的状态,您可以更改目标点名称,选择目标点(及运动指令)所属的工件坐标 。 6 单击 创建 以创建运动指令。运动指令将作为目标点的参照显示在路径节点下。
创建运动指令和相应的目标点:
要创建移动指令,请执行以下步骤:
1 单击运动指令 打开对话框。
2 选择运动指令的 参考坐标系。
3 单击点列表中的添加新建,然后在图形窗口中单击相应的到达点,以创建运动指令要伸展到的位置。您也可以在位置框内输入值。 然后单击添加。
4 输入运动指令的 方向。
5 单击 更多/更少 按钮,您可以展开或折叠 创建运动指令对话框。当对话框在展开的状态,您可以更改目标点名称,选择目标点(及运动指令)所属的工件坐标 。
6 单击 创建 以创建运动指令。运动指令将作为目标点的参照显示在路径节点下。
注意:
要查看某个路径上的移动指令编程设定的速度,在路径&目标 浏览器上,右键单击 该路径并单击查看 > 显示速度。速度值会沿着该路径显示出来。
TrueMove 路径:
使用 TrueMove 路径可视化,您可以精确看到机器人的编程路径,无论编程设定的速 度如何。在 RobotStudio 中,TrueMove 路径将会在虚拟控制器中执行移动前显示。 路径会将区域数据考虑在内。TrueMove 路径显示适用于线性和圆周移动指令。关节 移动会以直线显示,即使机器人采用了不同的路径。这些移动采用虚线显示,表示机 器人将不会精确的按此路径移动。
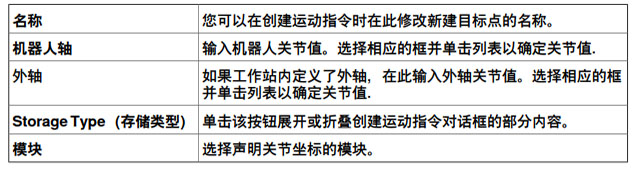
创建运动指令对话框(关节目标):