欢迎光临~上海仰光电子科技有限公司
 全国服务热线:
全国服务热线:
13371980026
全国服务热线:
13371980026




品牌:库卡
上架时间:2021-11-9 发布者:上海仰光
产品描述:法兰上的负载: 通过安装在机器人上的负载的运动(例如工具),作用力和扭矩就会作用在连接法兰上。此作用力和扭矩取决于移动轨迹及负载的质量、重心和惯性矩。 所给出的数值基于处于额定间距的额定负载,不包含安全系数。务必将负载数据输入到机器人控制系统中。机器人控制系统在轨迹规划时将负载考虑在内。 负载降低并不会强制产生更小的作用力和扭矩。 数值为通过试验和模拟得出的参考值,基于机器人系列中负载能力最高的机器。实际的作用力和扭矩可能会因连接法兰受到的内外部影响或作用点不同而不同。因此建议在必要时于机器人使用现场的实际条件下测定作用力和扭矩。 运行值可以持续地在正常移动轨迹下得出。建议在设计工具时注意疲劳强度。 在机器人出现紧急状况时会出现紧急停止数值。由于这种情况在机器人使用寿命中只会极少地出现,因此在大多数情况下静态强度证明即可。
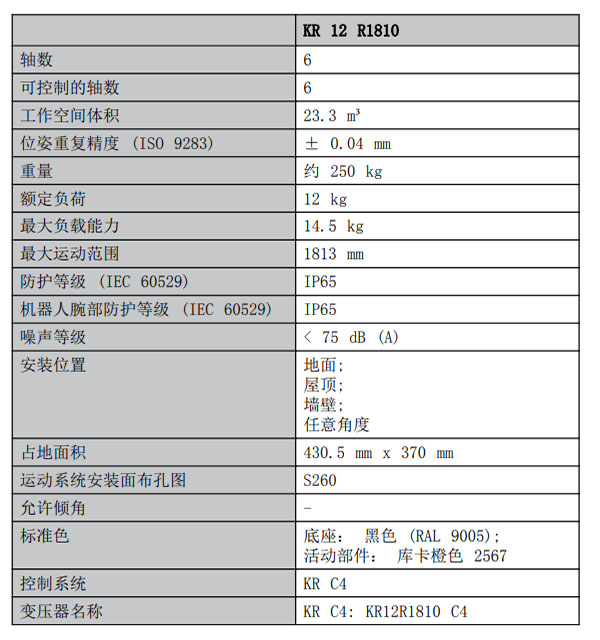
基本数据:
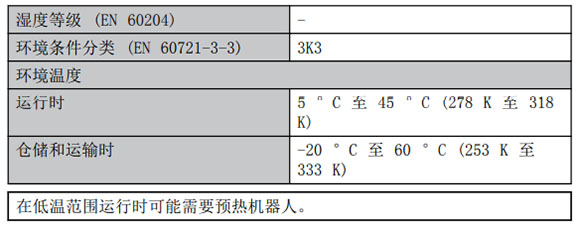
环境条件:
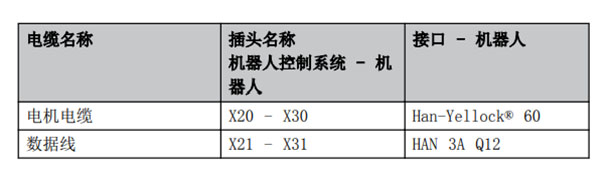
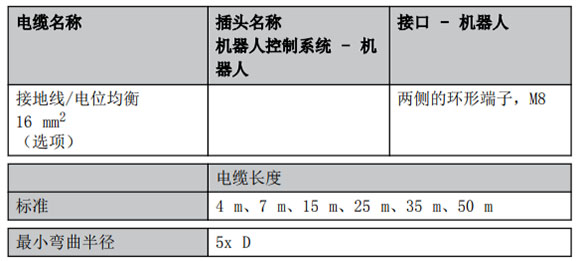
连接电缆:
轴数据:
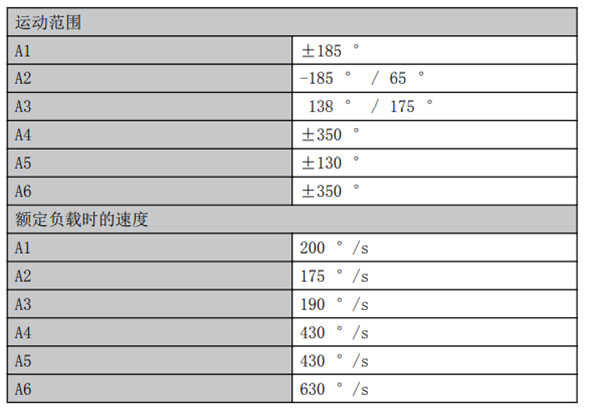
各个轴的运动方向和位置见下图。
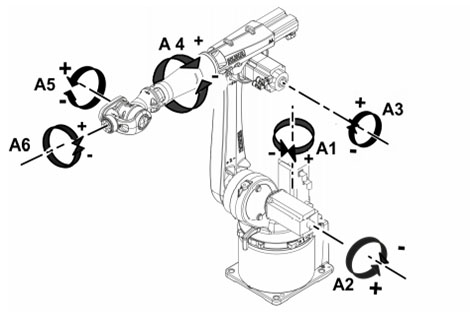
机器人轴的旋转方向。
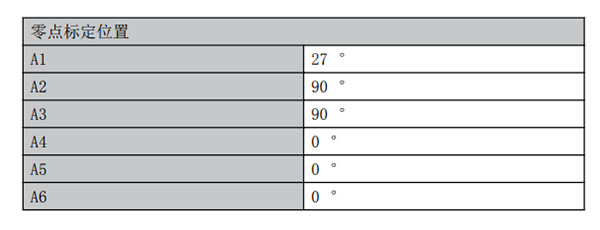
零点标定位置:
工作范围:
下面的插图为本产品系列的这些型号显示了工作区域的大小和形状。 工作范围的参考点是轴 4 和 5 的交点。
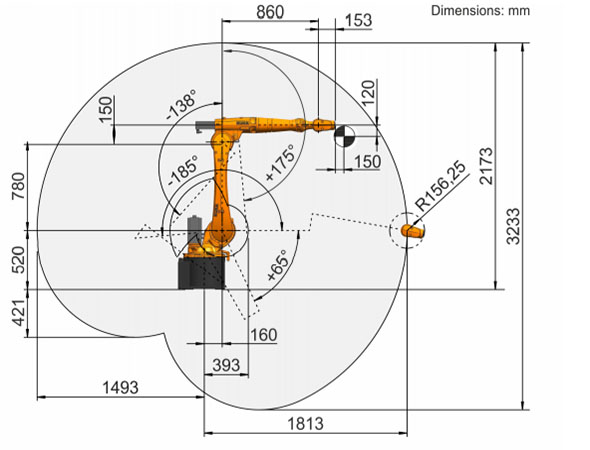
工作区域,侧视图,KR 12 R1810
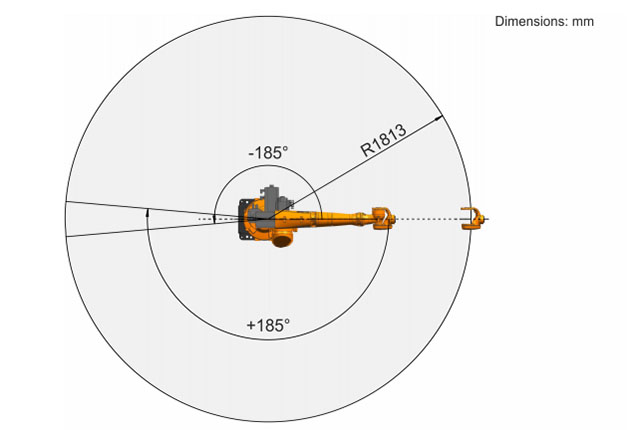
工作区域,俯视图,KR 12 R1810
倾斜位置:
机器人可选择介于 0° 位置(地面)和 180° 位置(天花板)之间的任何 安装位置。下图显示了轴 1 的运动范围在不同的机器人倾斜位置中可能受到 的限制。
如果不在地面位置运行机器人,则须将机器人的倾斜位置角度正确记录在控制 系统中。可在 WorkVisual 中实现角度配置。 在不改变机器人主作业方向时的倾斜角度:
地面:A:0°、B:0°、C:0°
墙壁:A:0°、B:90°、C:0°
天花板:A:0°、B:0°、C:180°
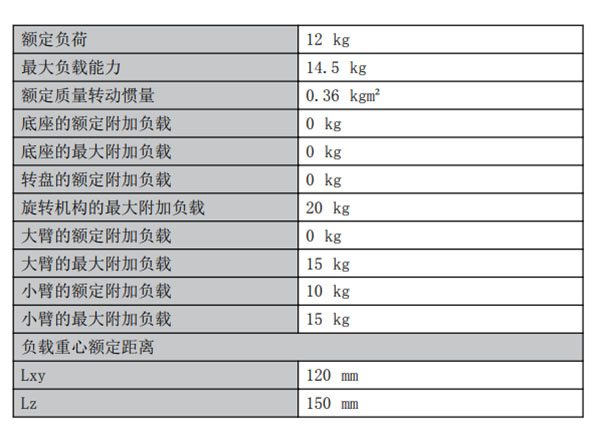
负载能力:
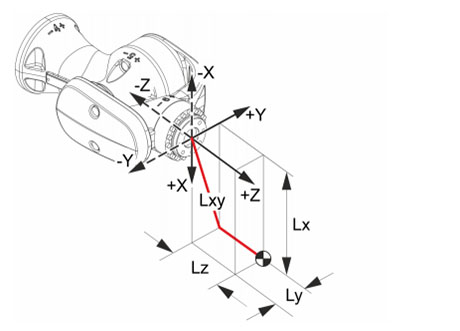
负载重心:
所有负载的负载重心与距轴 6 法兰面的距离有关。
负载能力图表:
提示:
该负载曲线对应于极端负载能力。每次都必须检查两个值(负载能力和质量 惯性矩)。超出时会影响机器人的使用寿命,使电机和齿轮箱过载,因此必 须询问 KUKA Deutschland GmbH。
此处得出的数值对机器人的使用计划非常必要。按照 KUKA 系统软件的操 作及编程指南,机器人投入运行时需要额外的输入数据。 必须用 KUKA.Load 检查惯性。务必将负载数据输入到机器人控制系统中!
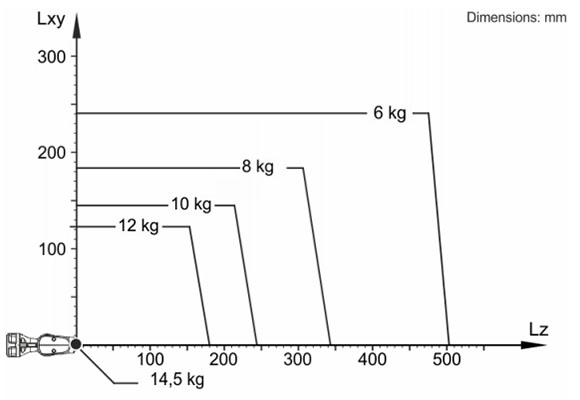
KR 12 R1810 负载能力图表:
KR 12 R1810 设计用于额定负载能力 12 kg,以便最佳利用机器人的性能和 动态性能。通过减小负载间距,也可以使用高达最大负载能力的更高负载。特 殊的负载情况必须用 KUKA.Load 进行检查。
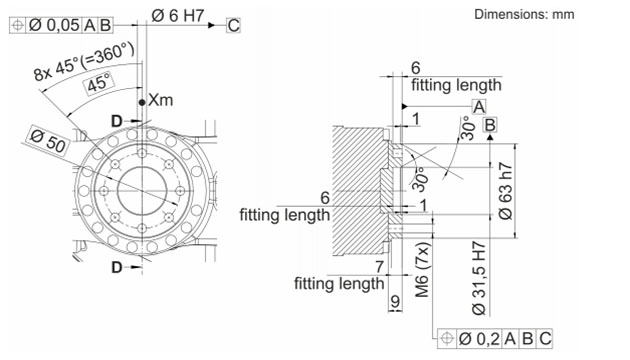
连接法兰 :

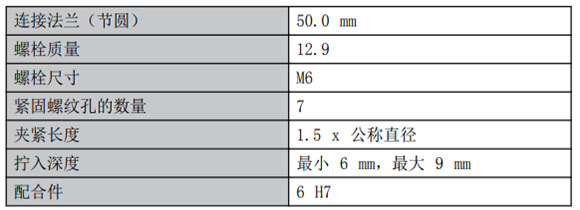
连接法兰图示对应于轴 4 和 6 在零位时的连接法兰位 置。符号 Xm 表示配合件(钻套)在零位时的位置。
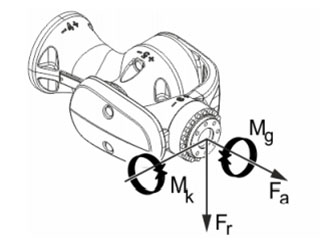
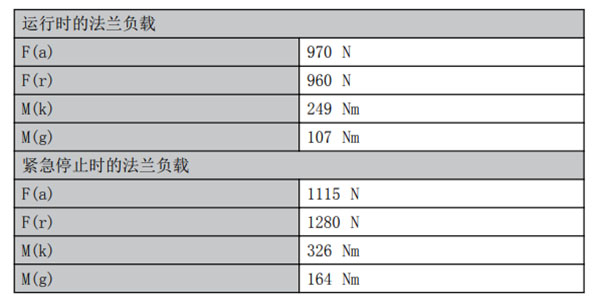
法兰上的负载:
通过安装在机器人上的负载的运动(例如工具),作用力和扭矩就会作用在连接法兰上。此作用力和扭矩取决于移动轨迹及负载的质量、重心和惯性矩。 所给出的数值基于处于额定间距的额定负载,不包含安全系数。务必将负载数据输入到机器人控制系统中。机器人控制系统在轨迹规划时将负载考虑在内。 负载降低并不会强制产生更小的作用力和扭矩。 数值为通过试验和模拟得出的参考值,基于机器人系列中负载能力最高的机器。实际的作用力和扭矩可能会因连接法兰受到的内外部影响或作用点不同而不同。因此建议在必要时于机器人使用现场的实际条件下测定作用力和扭矩。 运行值可以持续地在正常移动轨迹下得出。建议在设计工具时注意疲劳强度。 在机器人出现紧急状况时会出现紧急停止数值。由于这种情况在机器人使用寿命中只会极少地出现,因此在大多数情况下静态强度证明即可。
附加负载:
在机器人的小臂、大臂和转盘上可以承受附加负载。施加附加负载时应注意允许的最大总负载。加装方案的尺寸和位置见下图。
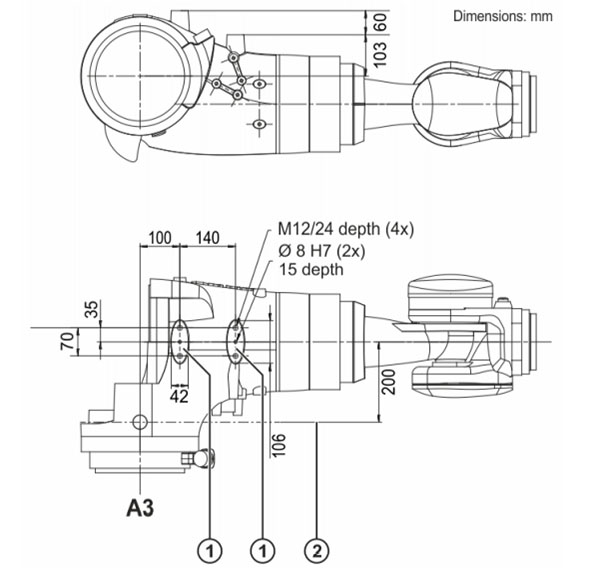
附加负载的固定,小臂
1 轴 4 的旋转平面 。
2 小臂的支承面。
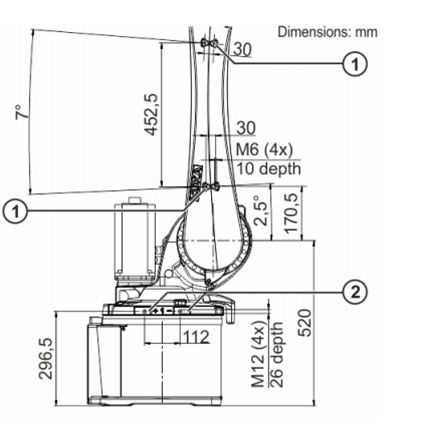
附加负载的固定,大臂/转盘
1 大臂的支承面 。
2 转盘的支承面,两侧。
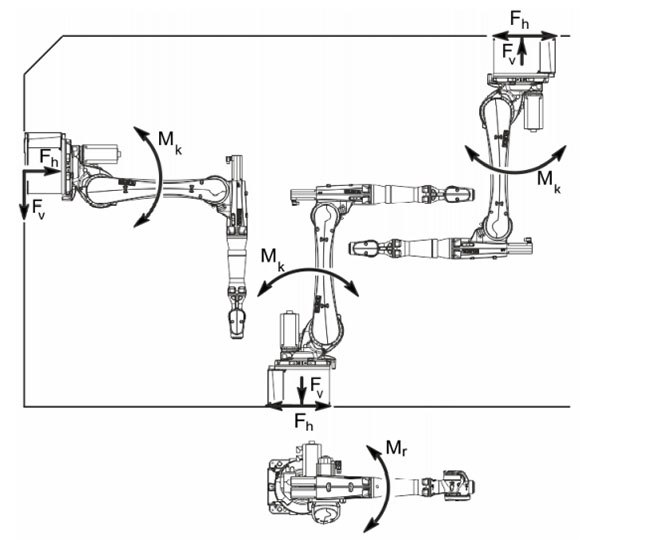
地基负载:
给出的力和力矩已经包括机器人的负载和惯性力(重量)。
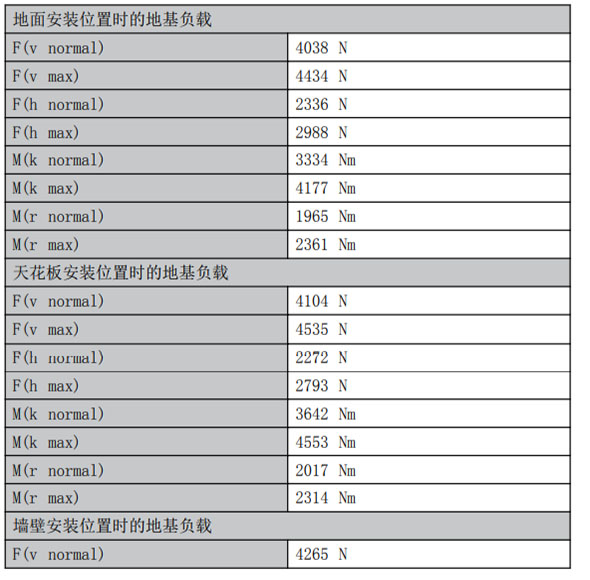
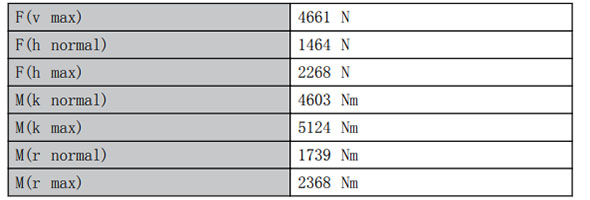
垂直力 F(v)、水平力 F(h)、倾斜力矩 M(k)、轴 1 的转矩 M(r)